Описание
|












































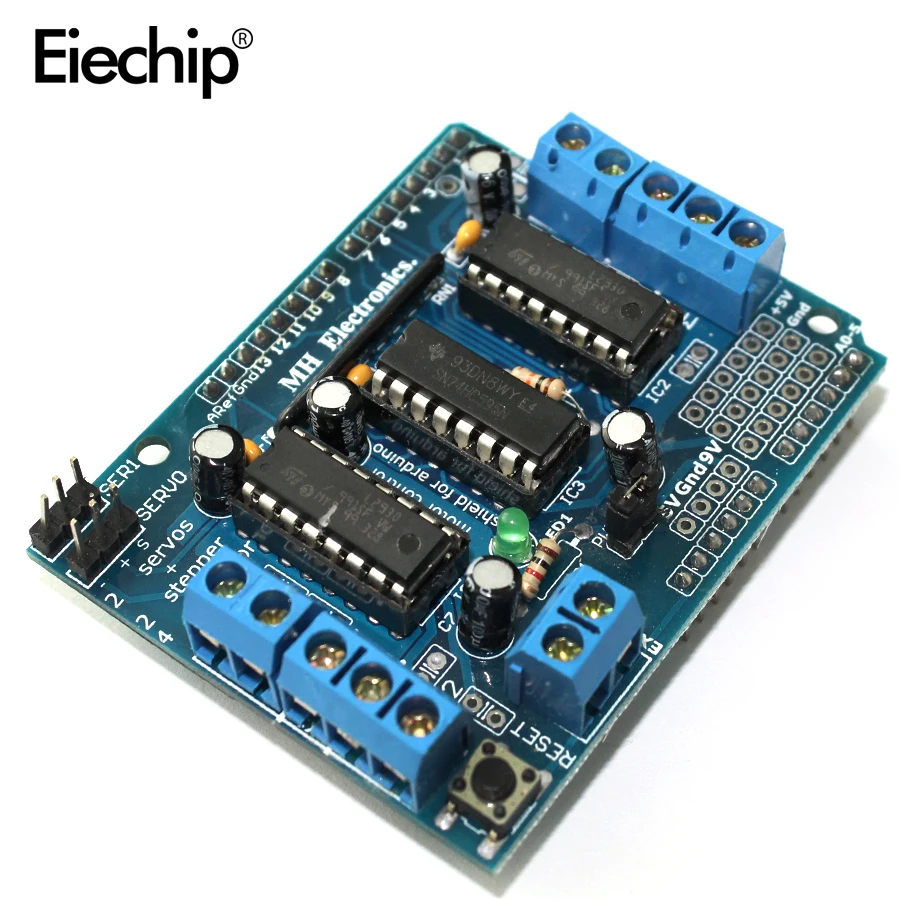
Обзор
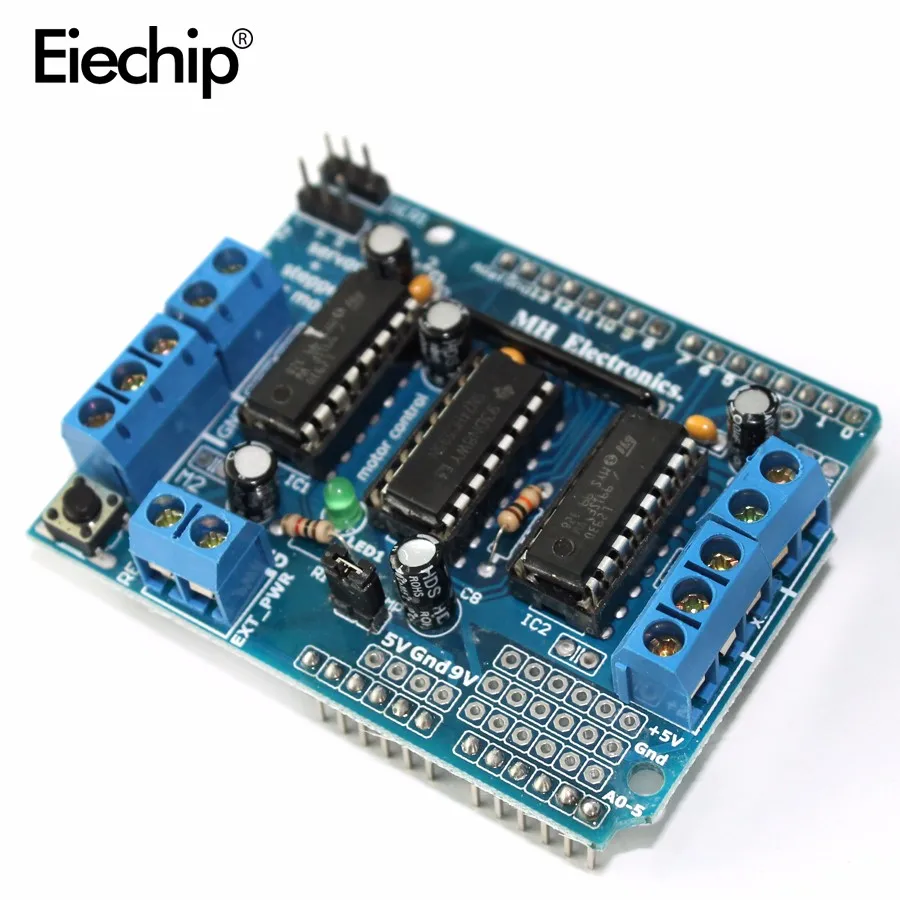
Мотор Щит на основе L293, который является двойной полный мост водитель предназначены для привода индуктивных нагрузок, таких как реле, соленоиды, DC и шаговых электродвигателей. Он позволяет управлять двумя двигателями постоянного тока с вашей доской, контролируя скорость и направление каждого из них самостоятельно. Вы также можете измерить поглощение тока мотора каждого мотора, среди других особенностей. Щит совместим с TinkerKit, что означает, что вы можете быстро создавать проекты, подключая модули TinkerKit к плате.
Резюме
| Рабочая Напряжение | 5 В до 12 В |
| Контроллер двигателя | L293D, Приводы 2 двигателя постоянного тока или 1 шаговый двигатель |
| Максимальный ток | 2A на канал или 4A max (с внешним блоком питания) |
| Текущий зондирования | 1,65 В/A |
| Бесплатная ходовая остановка и функция тормоза |
Мощность
Щит мотора Arduino должен питаться только внешним источником питания. Потому что L293 IC установлен на Щит имеет два отдельных подключения питания, один для логики и один для двигателя питания драйвера. Требуемый ток двигателя часто превышает максимальный ток USB.
Внешний (без USB) Источник питания может быть либо от адаптера переменного тока в постоянный ток (настенный), либо от аккумулятора. Адаптер может быть подключен путем подключения мм центра 2,1 мм-положительный штекер в разъем питания платы Arduino, на котором установлен Щит двигателя или путем подключения проводов, которые ведут блок питания к Vin и GND винтовые клеммы, заботясь о том, чтобы почитать полярности.
Чтобы избежать возможного повреждения платы Arduino, на которой установлен щит, мы повторно используем внешний источник питания, который обеспечивает напряжение от 7 В 12 В. Если вашему двигателю требуется более 9 В, мы рекомендуем вам отделить линии питания щита и платы Arduino, на которой установлен щит. Это возможно путем резки перемычки «Vin Connect», размещенной на задней стороне щита. Абсолютный предел для Vin на винтовых клеммах составляет 18 В.
Штыри питания следующие:
VinНа винтовой клеммной колодке находится входное напряжение двигателя, подключенного к щиту. Внешний источник питания, подключенный к этому контакту, также обеспечивает питание платы Arduino, на которой установлен. За счет сокращения"ВИН Connect"Перемычка делает это выделенной линией электропитания для двигателя. GNDЗаземление на винтовой клеммной колодке.Щит может поставлять 2 Ампера на канал, в общей сложности 4 Ампера максимум.
Вход и Выход
Этот щит имеет два отдельных канала, называемых A и B, что каждый использует 4 Arduino контактов для привода или чувств двигателя. Всего на этом щите используется 8 контактов. Вы можете использовать каждый канал отдельно для привода двух двигателей постоянного тока или объединить их для привода одного биполярного шагового двигателя.
Булавки щита, разделенные по каналу, показаны в таблице ниже:
| Функция | Контакты на канал. A | Контакты на канал. B |
| Направление | D12 | D13 |
| ШИМ | D3 | D11 |
| Тормоз | D9 | D8 |
| Текущий зондирования | A0 | A1 |
Если вам не нужен тормоз и текущее зондирование, и вам также нужно больше контактов для вашего приложения, вы можете отключить эти функции, разделив соответствующие перемычки на задней стороне щита.
Дополнительные розетки на щите описаны следующим образом:
Винтовые клеммыДля подключения двигателей и их источника питания. 2TinkerKitРазъемыДля двух аналоговых входов (в белом), подключен к A2 и A3. 2TinkerKitРазъемыДля двух Aanlog выходы (в orange в середине), подключен к ШИМ на контактах D5 и D6. 2TinkerKitРазъемыДля интерфейса TWI (в белом цвете с 4 контактами), один для ввода, а другой для вывода.Двигатели соединения
Щеткой двигатель постоянного тока. Вы можете управлять двумя почищенными щеткой моторами постоянного тока, соединяя два провода каждого из них в (+) и (-) винтовых клеммах для каждого канала A и B. таким образом, вы можете контролировать его направление путем установки высоких или низких контактов DIR A и DIR B, Вы можете контролировать скорость путем изменения значений рабочего цикла PWM A и PWM B. Тормоза A и тормоза B булавки, если установить высокий, будет эффективно тормозить двигатели постоянного тока, а не позволить им замедлить путем резки мощности. Вы можете измерить ток проходящие двигателя постоянного тока путем чтения SNS0 и SNS1 контакты. На каждом канале будет напряжение пропорционально измеренный ток, которые можно читать как обычный аналоговый вход, через функцию analogRead () на аналоговый вход A0 и A1. Для Вашего удобства он откалиброван, чтобы быть 3,3 В, когда канал обеспечивает свой максимальный возможный ток, то есть 2A.
Физические характеристики
Максимальная длина и ширина платы щита двигателя составляют 2,7 2,1 дюйм(ов) соответственно. Четыре отверстия под винт позволяют доске быть прикреплены к поверхности или корпусу. Обратите внимание, что расстояние между цифровыми контактами 7 и 8 составляет 160 мил (0,16 "), не является даже несколькими из 100 мил интервала других контактов.

1 шт. L293D расширения развитию
Характеристики
- Бренд
- Eiechip
- Состояние
- Новый
- Тип
- moudle
- Напряжение электропитания
- -
- Упаковка
- DIP
- Индивидуальное изготовление
- Да
- Мощность рассеивания
- -
- Номер модели
- L293D Motor Drive Shield dual
- Применение
- Компьютер
- Рабочая температура
- -
Сопутствующие товары