


Описание
Многоцелевой, с низким уровнем затрат манипулятор
6 DOF (построенный с DYNAMIXEL PRO)
Модульная структура для легкого обслуживания
Легкая конструкция для удобного размещения и подвижности.
Выдерживает полезную нагрузку, подходящую для малых и средних операций.
Широкий диапазон работы
Подходит для повторяющихся и высокоточных операций
Интерфейс USB, RS-485 связь
Предоставляет SDK для программирования пользователя
(Приведены примеры кинематики вперед/назад, контроля профиля)
| Захватный механизм машины-H | 1 (полностью в сборе) |
|---|---|
| Чехол | 1 |
| U2D2 | 1 |
| Комплект дополнительных кабелей (4 P, 2 P) | 1 |
| Набор винтов (WB M2.5 и т. Д.) | 1 |
| Память USB (SDK, руководство) | 1 |
| 4 P Ext концентратор | 2 |
| DOF | 6 |
|---|---|
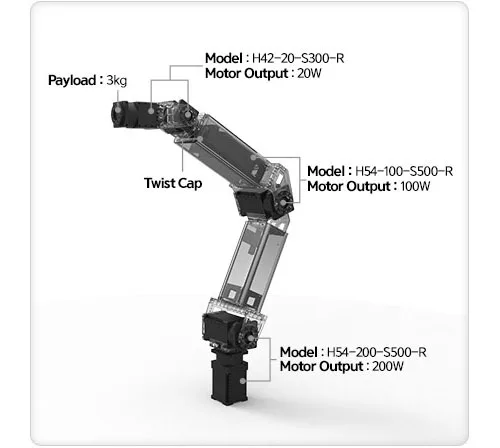
| Полезная нагрузка (кг) | 3 |
| Повторяемость (мм) | ±0. 05 |
| Скорость (каждое соединение, град/сек) | 180 |
| Вес (кг) | 5,5 |
| Досягаемость (мм) | 645 |
| Номинальное напряжение (в постоянного тока) | 24 |
| Связь | RS-485 (мульти автобус) |
| Двигатель Выход/соединение | 200 W/2ea 100 W/2ea 20 вт/2ea |
| Программное обеспечение | ROBOTIS манипулятор SDK |
| Контроллер | Пк (не входит в комплект) |
Характеристики привода (DYNAMIXEL PRO)S/W технические характеристики
Arm доступ коммуникационный протокол библиотеки и примеры
Примеры настройки и мониторинга параметров управления рукояткой
Кинматическая библиотека (FK, IK) и примеры
Библиотека управления профилями соединений/конечных точек и примеры
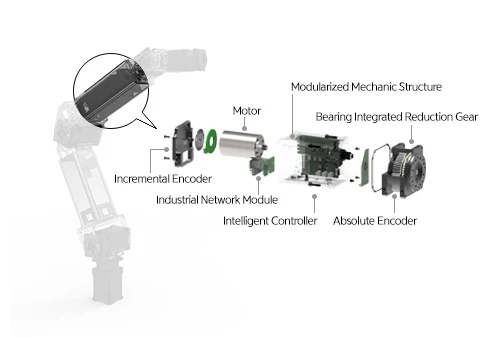
Все-в-одном
Двигатель постоянного тока + контроллер + драйвер + датчик + циклоидный редуктор
Небольшой, легкий
Уменьшенный размер модуля с саморазработанным небольшим, легким, циклоидным редуктором
Высокий вес на выходе (0,05 нм/г)
Высокая ударопрочность
Точное управление и низкий люфт
Инкрементный энкодер и бесконтактный магнитный энкодер для абсолютного позиционирования
Низкий люфт 3 ~ 4 arcmin
Предоставленные данные о производительности, проверенные коласом (корейская схема аккредитации лаборатории)
Контроль крутящего момента с помощью датчика тока
Высокоточный зондирующий алгоритм и контроль тока отзывы
Управление позицией, скоростью и током с помощью алгоритма
Легкая окружающая среда
Предоставляет C-based library
Предоставляет различные примеры решений (C + +, LabVIEW, C #, eclipse, JAVA и т. Д.)
Научно-образовательный
Экспериментируйте с кинматикой и динамикой
Дизайн и исследования двухстворчатая роботизированная система
Мобильный робот системы
Промышленной сфере Управление
Тесты и оборудование для обследования
Небольшой транспортной системы
Характеристики
- Бренд
- FaseLase
- Номер модели
- Manipulator-H
Сопутствующие товары









