

Описание
Введение:
\
\
1Цель.
\
\
1.Бесщеточный Датчик Холла постоянного тока с квадратной скоростью волны, током и двойными замкнутыми петлямиPIDАлгоритм управления
\
\
2.DC бесщеточный бессенсорная квадратная скорость волны, ток и двойная замкнутая петляPIDАлгоритм управления
\
\
3Синхронный двигатель с постоянным магнитомABZКвадрирования кодировщикВОК,SVPWM,Скорость, ток и двойная замкнутая петляPIDАлгоритм управления
\
\
4.Синхронный Датчик Холла с постоянным магнитомВОК,SVPWMСкорость, ток, двойная замкнутая петляPIDАлгоритм управления
\
\
5.Постоянный магнит синхронизация датчиковВОК,SVPWMСкорость, ток, двойная замкнутая петляPIDАлгоритм управления
\
\
6.Асинхронной передачи данныхВакуумная ОбжаркаАлгоритм управления
\
\
\
\
\
\
STM32Плата управления двигателем используется для бесщеточного двигателя постоянного тока, синхронного двигателя с постоянным магнитом, трехфазного асинхронного двигателя переменного тока. Это в основном для обучения управления двигателем, реализации или проверки мотора управления, и разработки пользователей моторной продукции.
\
\
\
\
2.Макетная плата параметры
\
\
STM32 макетная плата управления двигателем
\
\
1Напряжение питания платы управления:24 V
\
\
2Плата управления не соединена с нормальным рабочим током двигателя.60mA
\
\
3Максимальная грузоподъемность:60 Вт
\
\
4Выборка тока шины, выборка тока фазы, настройка и защита перегрузки по току;
\
\
3.Параметры двигателя
\
\
Трехфазный двигатель с постоянным магнитом:Трехфазный двигатель с постоянным магнитом с трехфазным датчиком положения холла и ортогональным энкодером соединены муфтой. Двигатель специально настроен, и задняя EMF является синусоидальным трехфазным постоянным магнитом; векторное управление FOC является управлением PMSM; шестиступенчатая импульсная коммутация PWM является контролем BLDC; асинхронный контроль VF переменного тока может быть показан на низкой скорости в этом моторе для изучения принципа VF преобразователя частоты переменного тока.
\
\
1Двигатель модели:24BLS01
\
\
2Мощность напряжение питающей сети:24 V
\
\
3Мощность:30 W
\
\
5Скорость:4000 об/мин
\
\
4Зал напряжение питающей сети:5 V
\
\
4.Кодеры conflg
\
\
Omron 1024 line ABZ Ортогональный энкодер:
\
\
1Мощность напряжение питающей сети:5-12 V
\
\
2Мощность Потребляемая мощность:20mAПосле
\
\
5.В качестве управляющего чипа выбран STM32F103
\
\
164 K флэш-память
\
\
2LQFP48
\
\
3Напряжение питания: 3,3 В
\
\
6.MOSFETВодителем ворот является IR2101S, а МОП-транзисторSTP80N70;
\
\
7.Скорость PID внешняя петля, ток внутренняя петля, двойной замкнутый цикл управления
\
\
8.Интерфейс связи RS232 с последовательным портом, удобен для оборудования или компьютерной отладки и тестирования
\
\
9.Поддержка RS485 и возможность связи, отладки и использования некоторых клиентов, использование соответствующих потребностей связи.
\
\
\
\
10.Схема блока управления и определение интерфейса
\
\
Системы блок-схема
\
\

\
\
Интерфейс определение схема
\
\

\
\
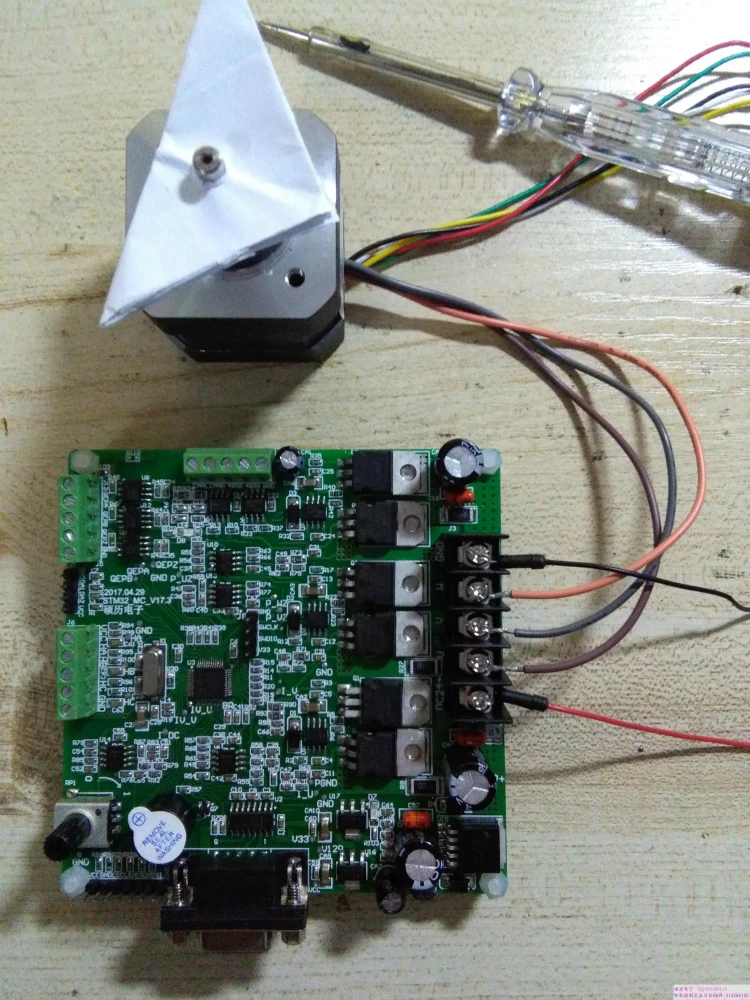
Физический эскиз
\
\

\
\
\
\
11.Экспериментальная содержание обучения
\
\
1)Бесщеточный Датчик Холла постоянного тока с квадратной скоростью волны, током и двойными замкнутыми петлямиPIDУправление эксперимент
\
\
Скачать режимы:STM32_BLDC_PWM_Hall
\
\
Режим подключения:
\
\

\
\

\
\
Видео Адрес: (BLDC) датчик холла DC бесщеточный двигатель скорость и ток двойной замкнутый цикл PID контроль
\
\
\
\
2)DC бесщеточный бессенсорная квадратная скорость волны, ток и двойная замкнутая петляPIDАлгоритм управления
\
\
Эксперимент
\
\
Скачать режимы:STM32_BLDC_PWM_Hallless
\
\
Режим подключения:
\
\

\
\
\
\
Видео Адрес: BLDC (линия Холла в руке oh) Бессенсорный DC бесщеточный двигатель скорость и ток двойной замкнутый цикл PID контроль
\
\
Http://cloud.video.taobao.com/play/u/878371483/p/1/e/6/t/1/50008698620.mp4
\
\
3)Синхронный двигатель с постоянным магнитомABZКвадрирования кодировщикВОК,SVPWMСкорость, ток, двойная замкнутая петляPIDУправление эксперимент
\
\
\
\
Скачать режимы:STM32_PMSM_FOC_QEncoder
\
\
Режим подключения:
\
\

\
\

\
\
\
\
\
\
Видео Адрес: (PMSM)КодировщикВок SVPWMДвойные замкнутые петли скорости и токаPIDУправление
\
\
Http://cloud.video.taobao.com/play/u/878371483/p/1/e/6/t/1/50003996483.mp4
\
\
\
\
4)Синхронный Датчик Холла с постоянным магнитомВОК,SVPWMСкорость, ток, двойная замкнутая петляPIDУправление эксперимент
\
\
Скачать режимы:STM32_PMSM_FOC_Hall
\
\
Режим подключения:
\
\
\
\
\
\
Видео по адресу: вентильныйHolzer с датчикомВок SVPWMДвойные замкнутые петли скорости и токаPIDУправление
\
\
Http://cloud.video.taobao.com/play/u/878371483/p/1/e/6/t/1/50008698598.mp4
\
\
5)Постоянный магнит синхронизация датчиковВОК,SVPWMСкорость, ток, двойная замкнутая петляPIDУправление эксперимент
\
\
Скачать режимы:STM32_PMSM_FOC_Sensorless
\
\
Режим подключения:
\
\
\
\
\
\
Видео по адресу: вентильныйБессенсорныйВок SVPWMДвойные замкнутые петли скорости и токаPIDУправление
\
\
Http://cloud.video.taobao.com/play/u/878371483/p/1/e/6/t/1/50008710430.mp4
\
\
6)Асинхронной передачи данныхВакуумная ОбжаркаУправление эксперимент
\
\
В этом эксперименте асинхронный двигатель переменного тока заменяется бесщеточным двигателем постоянного тока.. Алгоритм управления точно такой же.
\
\
Скачать режимы:STM32_ACIM_VF
\
\
\
\
Режим подключения:
\
\
\
\

\
\
\
\
12.Отгрузочная ведомость
\
\
\
\
1STM32 мотор Управление доска
\
\
13.Данных
\
\
1)Аппаратные средства ПараметрыPDFФормат;
\
\
2)Бесщеточный Датчик Холла постоянного тока с квадратной скоростью волны, током и двойными замкнутыми петлямиPIDПрограмма управления+Ознакомление с программным и аппаратным обеспечениемPDFФормат)
\
\
3)DC бесщеточный бессенсорная квадратная скорость волны, ток и двойная замкнутая петляPIDПрограмма управления+Ознакомление с программным и аппаратным обеспечениемPDFФормат)
\
\
4)Синхронный двигатель с постоянным магнитомABZКвадрирования кодировщикВОК,SVPWMСкорость, ток, двойная замкнутая петляPIDПрограмма управления+Ознакомление с программным и аппаратным обеспечениемPDFФормат)
\
\
5)Синхронный Датчик Холла с постоянным магнитомВОК,SVPWMСкорость, ток, двойная замкнутая петляPIDПрограмма управления+Ознакомление с программным и аппаратным обеспечениемPDFФормат)
\
\
6)Постоянный магнит синхронизация датчиковВОК,SVPWMСкорость, ток, двойная замкнутая петляPIDПрограмма управления+Ознакомление с программным и аппаратным обеспечениемPDFФормат)
\
\
7)Трехфазный асинхрон переменного токаВакуумная ОбжаркаПрограмма контроля скорости исходного кода+Ознакомление с программным и аппаратным обеспечениемPDFФормат)
\
\
\
\
Данных скриншот
\
\


\
\

\
\
\
\
15.Монтажная плата Размеры
\
\

\
\
\
\
16. ПроизводствоИзображение
\
\
\
\
\
\
\
\
 Статор и ротор трехфазного двигателя постоянного магнита в этой посылка разработаны на заказ, и задняя EMF Синусоидальная, как показано ниже.1,2,3Слева находится активный двигатель, управляемый ведущей платой, а справа-двигатель (пассивный двигатель), соединенный муфтой. Скорость двигателя находится в800 об/минИзмеряется влево и вправоUВзаимноWФазовая задняя Форма волны EMF.
Статор и ротор трехфазного двигателя постоянного магнита в этой посылка разработаны на заказ, и задняя EMF Синусоидальная, как показано ниже.1,2,3Слева находится активный двигатель, управляемый ведущей платой, а справа-двигатель (пассивный двигатель), соединенный муфтой. Скорость двигателя находится в800 об/минИзмеряется влево и вправоUВзаимноWФазовая задняя Форма волны EMF.
\
\
 Таблица размеров1.Синусоидальная форма обратной электромоторной силы трехфазного постоянного магнита двигателя
Таблица размеров1.Синусоидальная форма обратной электромоторной силы трехфазного постоянного магнита двигателя
\
\
 Таблица размеров2.Схема проводки трехфазного двигателя с постоянным магнитом
Таблица размеров2.Схема проводки трехфазного двигателя с постоянным магнитом
\
\

\
\
Таблица размеров3.Испытательная панорама трехфазного двигателя с постоянным магнитом
'
Характеристики
- Тип
- Части Кондиционера
Сопутствующие товары








