



Описание


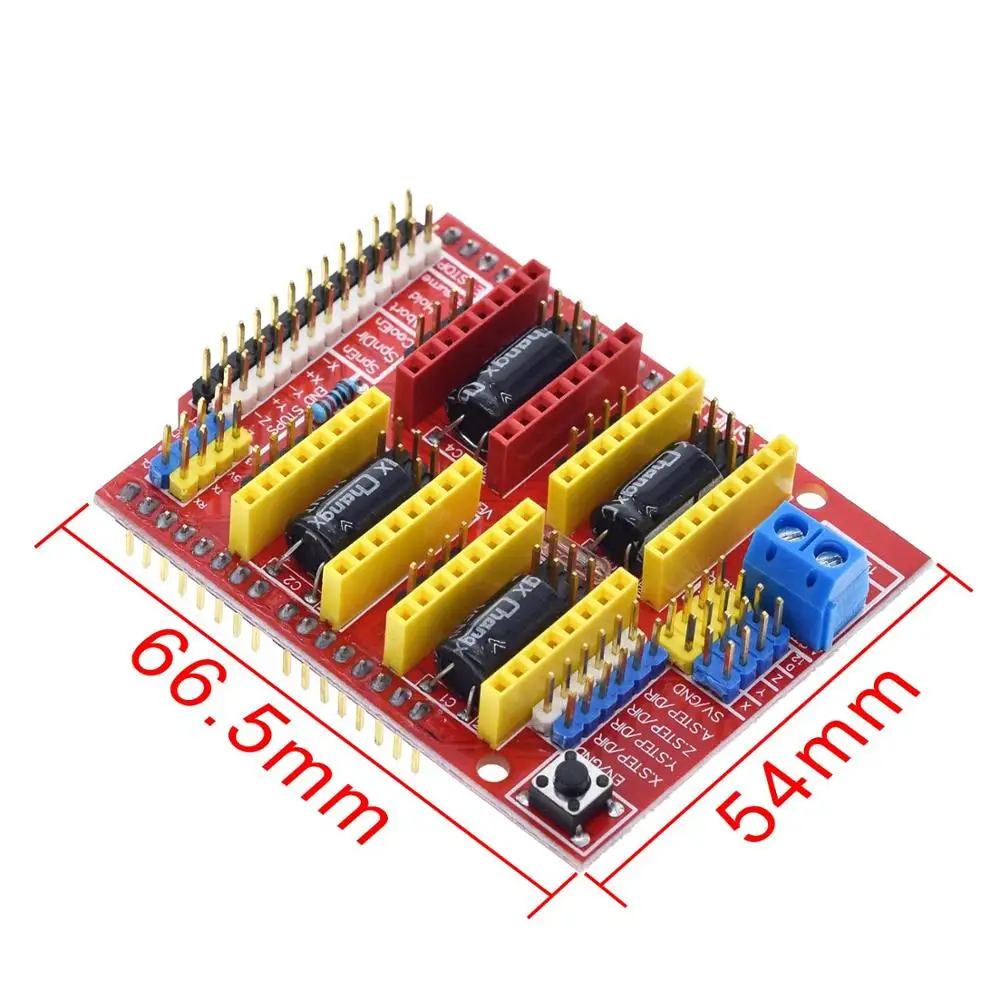
Эта плата расширения как плата расширения драйвера, используется для гравировальных машин, 3D принтеров.
Это в общей сложности четыре слота, может управлять четырьмя шаговыми двигателями A4988. Для каждого дорожного шагового двигателя требуется только два порта ввода-вывода. Другими словами, шесть портов ввода-вывода могут хорошо управляться тремя шаговыми двигателями. Очень удобен в использовании.
Например, информация о соответствии модуля IO порта UNO:
Ввода-вывода показатель выше и выше
UNO Плата расширения
8: EN (Драйвер шагового двигателя включает, активный низкий)
7: Z. DIR (контроль направления оси Z)
6: Y. DIR (управление направления оси Y)
5: X. DIR (управление направления оси X)
4: Z. Шаг (Z-axis stepper control)
3: Y. Шаг (ось Y Шагового управления)
2: X. Шаг (X-axis stepper control)
/Ниже приведены простые процедуры управления шаговым двигателем,
# Define EN 8/включение шагового двигателя, активный низкий
# Define X_DIR 5/X-axis stepper motor direction control
# Define Y_DIR 6/ось y Шагового управления направления двигателя
# Define Z_DIR 7/z Ось шагового управления направления двигателя
# Define X_STP 2/x-ось Шагового управления
# Define Y_STP 3/ось y шаговый контроль
# Define Z_STP 4/z-ось Шагового управления
/*
/Функция: шаг. Функция: для контроля направления шагового двигателя, количества шагов.
/Параметры: управление направления dir, dirPin соответствующий шаговый двигатель DIR pin, stepperPin соответствующий шаговый двигатель "шаг" pin, шаг номер шага без возвратного значения.
*/
Шаг void (булевой dir, byte dirPin, byte stepperPin, int шаги)
{
Цифровая запись (dirPin, dir);
Задержка (50);
Для (int i = 0; i
DigitalWrite (stepperPin, HIGH);
DelayMicroseconds (800);
Цифровая запись (stepperPin, LOW);
DelayMicroseconds (800);
}
}
Void setup () {/шаговый двигатель, используемый в pin IO, настроен на выход
PinMode (X_DIR, выход); pinMode (X_STP, выход);
PinMode (Y_DIR, выход); pinMode (Y_STP, выход);
PinMode (Z_DIR, выход); pinMode (Z_STP, выход);
PinMode (EN, выход);
Цифровая запись (EN, LOW);
}
Void loop () {
Шаг (false, X_DIR, X_STP, 200);/ось двигателя обратного хода 1 кольцо, 200 шаг-это круг.
Шаг (false, Y_DIR, Y_STP, 200);/ось двигателя обратного хода 1 кольцо, 200 шаг-это круг.
Шаг (false, Z_DIR, Z_STP, 200);/z ось двигателя обратного 1 кольцо, 200 шаг является окружностью.
Задержка (1000);
Шаг (true, X_DIR, X_STP, 200);/двигатель оси X вперед 1 круг, 200 шаг-это круг.
Шаг (true, Y_DIR, Y_STP, 200);/ось двигателя вперед 1 круг, 200 шаг-это круг.
Шаг (true, Z_DIR, Z_STP, 200);/z ось двигателя вперед 1 круг, 200 шаг-это круг.
Задержка (1000);
}
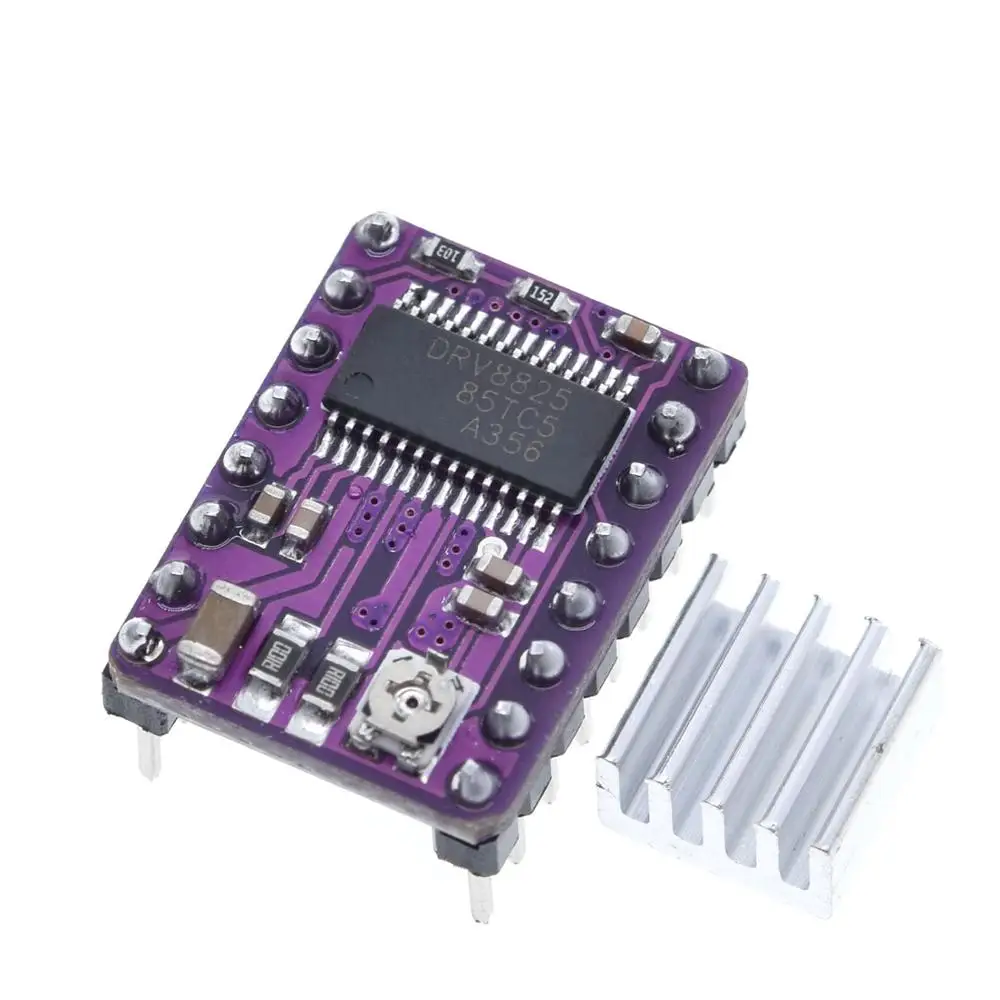
Примечание: при вставке модуля A4988, будьте осторожны, чтобы не вставлять обратное. Проводка шагового двигателя:
2A, 2B-это группа (красный, зеленый), 1A, 1B-группа (синий, желтый), если хотите изменить направление, можно изменить положение одной группы, например, 2А, 2В взаимный обмен.
2 шт. разъема (в цепях с обеих сторон)
Отгрузочная ведомость:
1 х cnc щит v3
4 X DRV8825
4 х радиатора
1X UNO R3
1X кабель





Характеристики
- Бренд
- TZT
- Состояние
- Новый
- Тип
- Регулятор напряжения
- Упаковка
- DIY KIT
- Индивидуальное изготовление
- Да
- Номер модели
- cnc shield V3 engraving machine
- Применение
- experimental modules
- Рабочая температура
- -40-+85
- For Arduino STM
- electronic module
Сопутствующие товары









