

Описание
Общее описание
PMC006B4 является типом миниатюрного интегрированного шагового двигателя микрошагового контроллера, который может быть непосредственно установлен в задней части(Национальная ассоциация владельцев электротехнических 17/23Шаговый двигатель серии etc. Контроллер серии управляется шиной RS485. Легко достичь промышленной сети управления до 120 узлов с помощью контроллера PMC006B4, который будет иметь превосходное подавление шума и превосходную плавность движения. PMC006B4 предоставляет простой и богатый набор команд управления, который не только значительно упрощает сложность системы управления верхним слоем, но и максимально сохраняет гибкость управления, И особенно подходит для различных промышленных применений, которые требуют низкой вибрации, высокой точности и широкого диапазона напряжения.
Особенности

RS485 интеллигентая (ый) сетевое оборудование
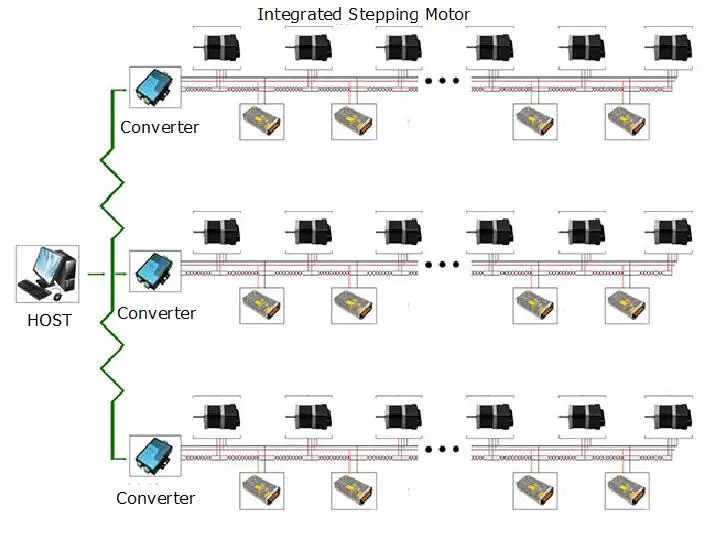
Многоосевой контроль: он предоставляет сетевую схему, которая использует шину RS485 для подключения нескольких контроллеров PMC006B4 на рисунке. Максимальное расстояние связи схемы составляет 1200 метров. Если расстояние передачи превышает 50 метров при использовании пары витой пары для подключения всех узлов, оба конца сети должны быть завершены с помощью 120Ω оконечных резисторов, чтобы предотвратить отражение сигнала и превышение. Между тем хост RS485 и контроллер каждого узла должны быть заземлены.

Интегрированный Установка

Интегрированная установка: как показано на рисунке, микроконтроллер шагового двигателя PMC006 B4 принимает высокоинтегрированный чип обработки и интегральную схему. Общий размер контроллера составляет всего 42 мм * 42 мм * 21,6 мм, который может быть непосредственно установлен в задней части(Национальная ассоциация владельцев электротехнических 17/23И т. Д. Шаговый двигатель, этот метод конструкции может сэкономить место установки в большой степени и уменьшить жгут проводов многоблочной сети в то же время.
Множественное предохранение
Множественная защита: микроконтроллер шагового двигателя PMC006 B4 принимает прецизионный алюминиевый корпус, который может привести к защите и тепловыделению. В то же время контроллер принимает несколько функций защиты от перенапряжения, перегрузки по току и перегрева.
Низкая скорость, низкий уровень шума и низкая вибрация

Низкая скорость, низкий уровень шума и низкая вибрация: PMC006 B4 микро-драйвер шагового двигателя принимает низкоскоростной алгоритм оптимизации, с минимальной скоростью 0,0024 об/мин и почти без вибрации и шума. Он широко используется в высокоточных и высокостабильных вариантах применения, таких как платформа камеры, медицинское сканирование, сканирование металлических трещин и т. Д.
Простые варианты не требуют использования хост-компьютера.
Программы записываются и работают в автономном режиме

Пользовательская программа: интегрированный Драйвер шагового двигателя PMC006B4 может быть настроен в автономный режим. В этом режиме контроллер автоматически выполняет пользовательский код пользователя после включения, код скомпилируется и заранее сжигается на EEPROM через программное обеспечение CQPUSI. В некоторых простых ситуациях применения пользователь может использовать инструмент для отладки Pusi для записи желаемых эффектов программы в контроллер. После сохранения, пользователь не нужен хост-компьютер, только нужно поставить питание на контроллер для достижения контроля.
Стандартный интерфейс

Описание:
Терминал место порт

Соединение мотора J2
| Pin-код №: | 1 | 2 | 3 | 4 |
| Целеуказатель: | M10 | M11 | M20 | M21 |
Описание:
M10, M11: подключение к шаговому двигателю фазы A
M20, M21: подключение к шаговому двигателю фазы B
Предупреждение: неправильное подключение питания или фазы постоянно повредит контроллер!
Мощность соединение J3
| Pin-код №: | 1 | 2 |
| Целеуказатель: | GND | VCC |
Описание:
VCC: напряжение питания, 8 ~ 36 В
GND: Заземление напряжения питания
Предупреждение: заряженный штекер не рекомендуется, что может повредить контроллер постоянно!
Соединение сигнала J1
| Pin-код №: | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| Целеуказатель: | DVDD | DVDD | GND | GPI2 | GPI1 | NC | EXT1 | FSET | RXD | ТСД |
| Pin-код №: | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| Целеуказатель: | GPI4 | GPI5 | GND485 | EXT2 | GPI3 | GPO1 | GPO2 | GPO3 | GPO4 | GPO5 |
Описание:
GPI1 ~ 5: общие входы 1-5
GPO1 ~ 5: Универсальные выходы 1-5
NC: Null. Резервный бит, не подключен ни к одной из периферийных устройств
DVDD: Выходное напряжение (+ 5 В)
Заземление: цифровой наземной
GND485: RS485 заземления
EXT1: вход сигнала внешнего концевого переключателя 1 (открытый цикл)
EXT2: внешний концевой переключатель сигнала вход 2 (открытый цикл)
TXD: RS232/RS485 шинопередающие сигналы или подключенный модуль приемопередатчика CAN
RXD: RS232/RS485 приемные сигналы автобуса или подключенный модуль приемопередатчика CAN
FSET: восстановление заводских настроек, активный низкий уровень
Предупреждение: напряжение всех сигнальных портов должно быть между-5,3 В ~ + в дополнение к TXD и RXD.
Ускорение и замедление s-кривой
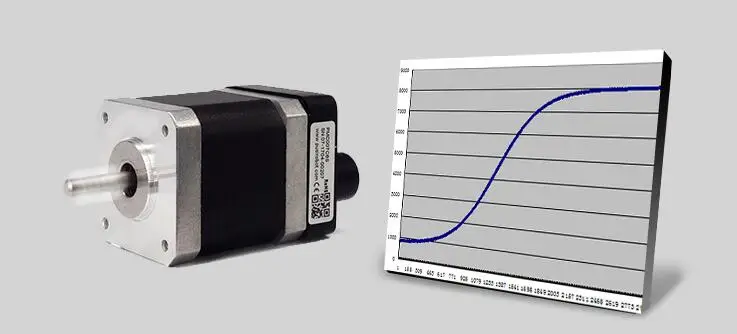
Ускорение и замедление s-кривой: контроллер PMC006B4 поддерживает функцию автоматического ускорения и замедления s-кривой без дополнительных опорных модулей. После того, как ускорение/замедление/стартовая скорость/стоп-скорость задана инструкцией, контроллер рассчитывает кривую ускорения в реальном времени до тех пор, пока не будет зафиксирована Максимальная скорость. Затем контроллер рассчитывает кривую замедления для управления замедлением двигателя.
Условия разработки
(Подключение непосредственно к компьютеру без других контроллеров)

Введение в инструмент отладки
Использование rs может использовать инструмент CQPUSI программное обеспечение инструмент отладки для установки параметров управления двигателя, обнаружения порта, пользовательского программирования.
Соединение

Основной интерфейс
Во-первых, в соответствии с настройками системы выберите номер последовательного порта. И порт настроен на формат 9600, n, 8,1, откройте последовательный порт. Затем вы можете нажать кнопку ldquoScanrdquo для сканирования сайта. Все места, подключенные к шине, будут отображаться слева от окна. Пользователь может дважды щелкнуть, чтобы выбрать любой из узлов для работы.

Изготовленный На Заказ программирования Интерфейс
Нажмите кнопку «автономное программирование» в основном интерфейсе, чтобы войти в этот интерфейс. Если в контроллере PMC006B4 уже имеется инструкция пользователя, нажмите на команду ldquoread bufferrdquo, все инструкции могут быть прочитаны и отображены автоматически. Пользователи могут управлять инструкцией через кнопки «Вставить», «удалить», «вверх», «вниз» и другие кнопки.
После завершения обработки, когда пользователи должны сделать онлайн-отладку, сначала нажмите кнопку "write cmd to the buffer", чтобы загрузить программы на чиповую память контроллера PMC006xx, затем нажмите кнопку «попробуйте выполнить текущую команду», а затем отладочная инструкция, указанная курсором. После подтверждения нажмите кнопку «написать в EEPROM», чтобы сгореть все программы на энергонезависящую память. Если выбрать «автономный exec», контроллер PMC006xx автоматически запустит программы, которая уже сгорела при следующем включении питания.
После успешного ввода в эксплуатацию инструкции, вы можете нажать кнопку "сохранить", чтобы сохранить инструкцию на локальный диск, так что, когда необходимо сгореть пакет, пользователи могут только нажать кнопку «открыть» для чтения программы, хранящейся на диске, затем нажать «запись инструкции в буфер» И кнопка «написать в EEPROM» для загрузки программы на контроллеры.
Примечание: как только пользователь входит в автономный интерфейс программирования, будет запрещено автоматическое выполнение пользовательской программы, даже если в интерфейсе нет операции. Поэтому, когда пользователь оставляет этот интерфейс, нужно нажать кнопку «off line executerdquo», чтобы сделать его открытым. В противном случае пользовательская программа не будет автоматически запускаться при включении контроллера.
Порты и разъёмы тест интерфейса

Тестовый интерфейс порта используется для отладки порта ввода-вывода PMC006B4 в режиме реального времени. После нажатия кнопки «Монитор состояния» индикатор будет отображать текущее состояние порта в режиме реального времени. После отмены ldquostate monitorrdquo можно присваивать уровень выходного порта.
Библиотеки динамических каналов
CQPUSI инструментальное программное обеспечение инструмент отладки содержит динамическую ссылку библиотеки для интерфейса связи, который используется для разработки пользовательской программы хоста компьютера. DLL использует очень простую функцию интерфейса, включая инициализацию последовательного порта, отправку и получение команды и данных, а также другие основные функции. Чтобы облегчить дополнительную отладку, DLL также предоставляет записи журналов в реальном времени, которые сохранены как формат файла даты + времени. Для получения подробной информации, пожалуйста, обратитесь к "динамической информации об использовании библиотеки" в посылка программного обеспечения
Технические данные
Общие
| PMC006 из серии «машины» | |
| Хост | ПК, ПЛК, MCU |
| Поддержка мотор | 2-фазный шаговый двигатель |
| Развития окружающей среды | VC C # Labviwe VB Linux pyton |
| Напряжение питания | 9-36 в пост. Тока |
| Выход ток | DC 4A |
| Microstepping | 0/128 регулируемый |
| Температура | -20 ℃-80 ℃ |
| Максимальная частота импульсов | 16к |
| Долговечность | Более 20000 часов |
Входной сигнал
| Общие ввода/вывода | Описание продукта: |
| Ввода-вывода функция | Вход аварийной остановки, Управление тормозом, цифровой вход/выход, аналоговый вход, сброс до заводских настроек, выход 5 В |
| Входной Технические характеристики | Цифровое Входное напряжение: 0-5 В Аналоговое регулирование скорости Входное напряжение: 0-5 В Входное напряжение аварийной остановки: 0-5 В Общие порты: 10 |
Связь
| Описание продукта: | |
| Протокол | RS485/RS232 |
| Скорость передачи данных | 9,6 k бит/регулируемый |
Габариты (мм)

Скачать
| CAD | . DWG |
| 3D файл | . STP |
| Руководство по эксплуатации | PMC006B4_USER_MANUAL_V0.1.36 |
| Отладки программного обеспечения | PUSIDebugTool_V1.0.23.rar |
| Разработка документа | CE |
Гид по выбору

Посылка в том числе

Для получения дополнительной информации, пожалуйста, перейдите на наш официальный сайт или отправьте письмо на наш почтовый ящик
Характеристики
- Бренд
- PUSIROBOT
- Тип двигателя
- Шаговый электродвигатель
- Номер модели
- PMC006B4
- Bus interface
- RS485
- Peak current
- 3.75A
- Size
- 42mm*42mm*18mm
- Motor size
- NEMA11,NEMA17,NEMA23
Сопутствующие товары








